今晚必出二码是一家以工业机器人以及自动化非标设备于一体的技术企业,公司致力于焊接、切割、机器人机床上下料等领域的机器人智能化研究和产业化应用
查看更多+


公司立足于高端装备制造等战略新兴产业,将追逐“制造2025"致力于机器人技术和互联网技术的深度融合,推动智造。
查看更多+
发布:2024-07-05 浏览:0
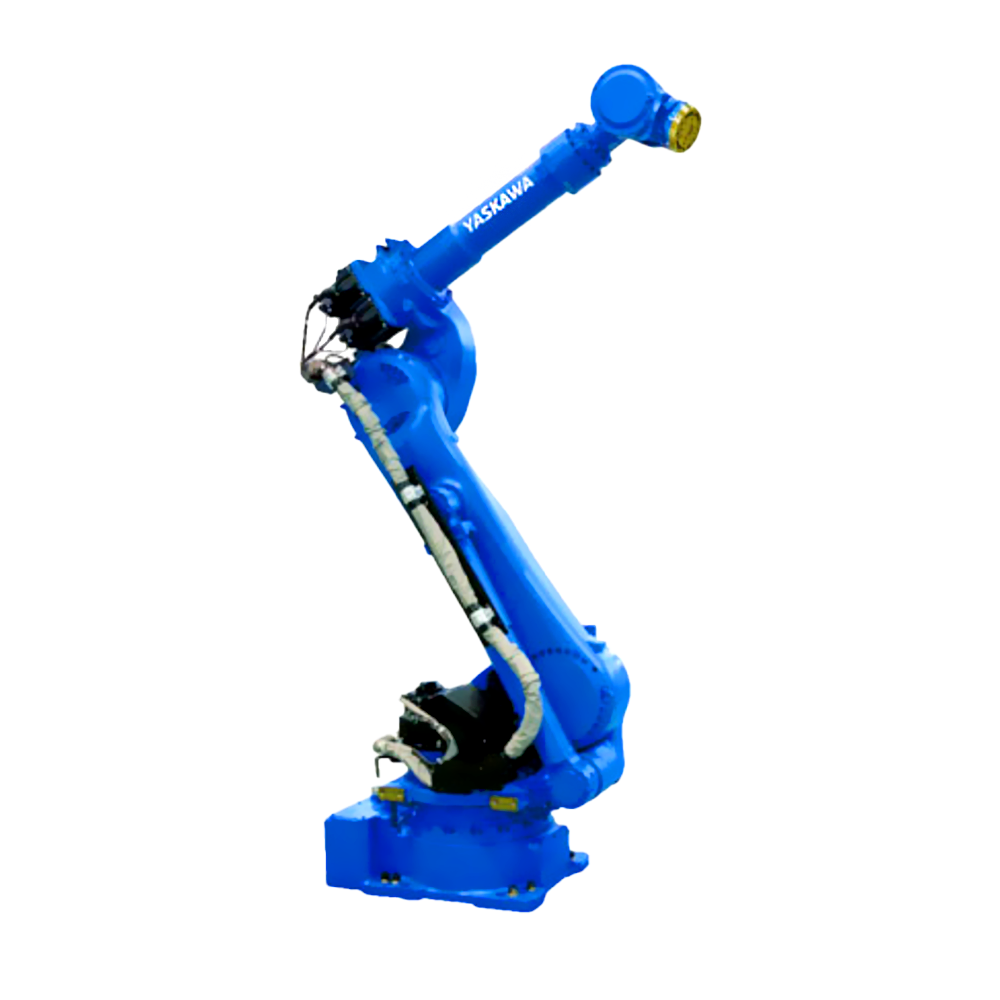
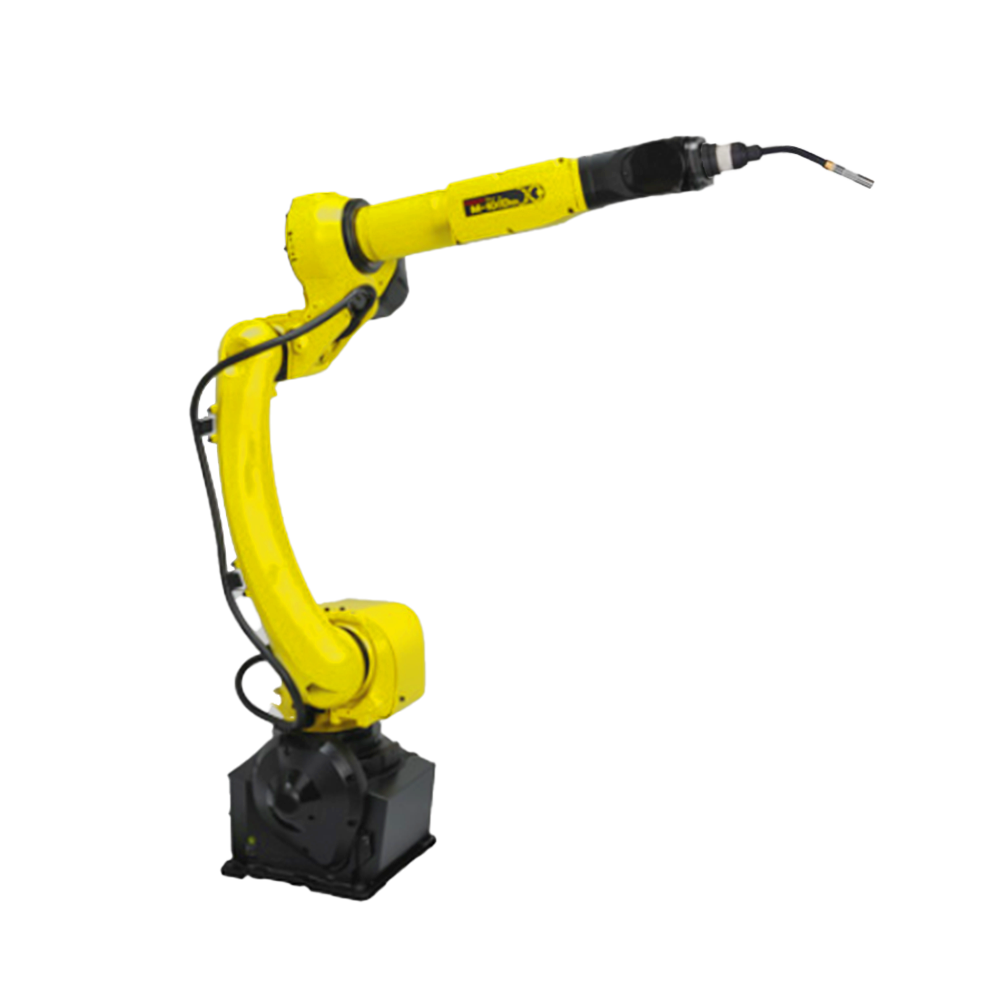
工业机器人的基本组成:机械部分、传感部分、控制部分、控制部分、控制系统。
The basic components of industrial robots include mechanical parts, sensing parts, control parts, control parts, and control systems.
机械结构系统:它是利用各种电动机产生的力矩和力,直接或间接的驱动机器人本体以获得机器人的各种运动的执行机构。作用:提供机器人各部位、给关节动作的原动力。驱动系统可以是液压传动、气动传动、电动传动,或者把它们结合起来应用的综合系统;可以直接驱动或者通过同步带、链条、轮系、谐波齿轮等机械传动机构进行间接驱动。
Mechanical structure system: It utilizes the torque and force generated by various electric motors to directly or indirectly drive the robot body to obtain various motion execution mechanisms of the robot. Function: Provide the driving force for various parts of the robot and joint movements. The driving system can be hydraulic transmission, pneumatic transmission, electric transmission, or a comprehensive system that combines them for application; It can be directly driven or indirectly driven through mechanical transmission mechanisms such as synchronous belts, chains, gear trains, harmonic gears, etc.
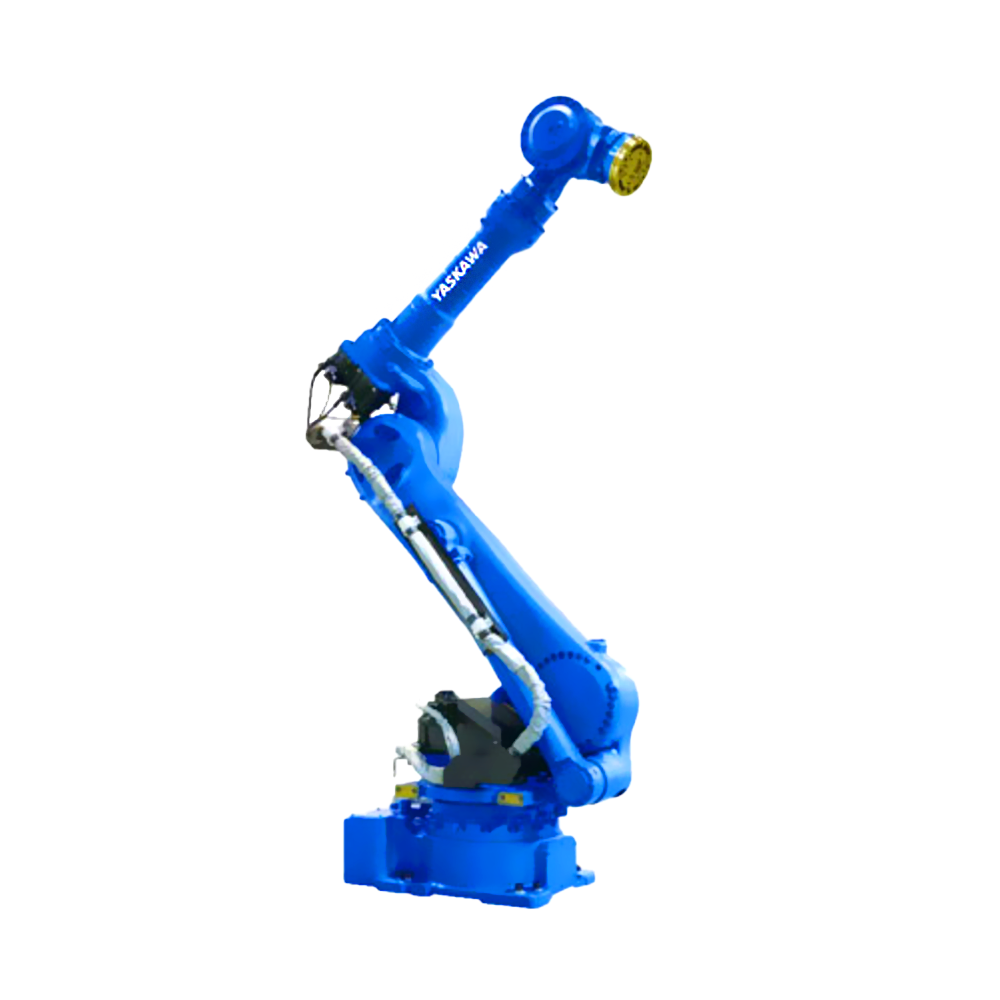
工业机器人的机械结构系统指机器人的主体机械,即机座和实行机构,由机身、手臂、未军执行器三大组件组成。每一大件都要若干自由度构成一个多自由度的机械系统。若机身具有行走机构便构成行走机器人;若机身不具备行走及转腰机构,则构成单机器人臂。手臂一般由上臂、下臂和手腕组成。末端执行器是安装在手腕上的重要部件,它可以是二手指或多个手指的手爪,也可以是喷漆枪、焊枪等。
The mechanical structure system of industrial robots refers to the main machinery of the robot, namely the base and implementation mechanism, composed of three major components: the body, arms, and military actuators. Each large piece requires several degrees of freedom to form a multi degree of freedom mechanical system. If the body has a walking mechanism, it constitutes a walking robot; If the body does not have a walking and waist turning mechanism, it constitutes a single robot arm. The arm is generally composed of the upper arm, lower arm, and wrist. The end effector is an important component installed on the wrist, which can be a second-hand finger or a claw with multiple fingers, as well as a spray gun, welding gun, etc.
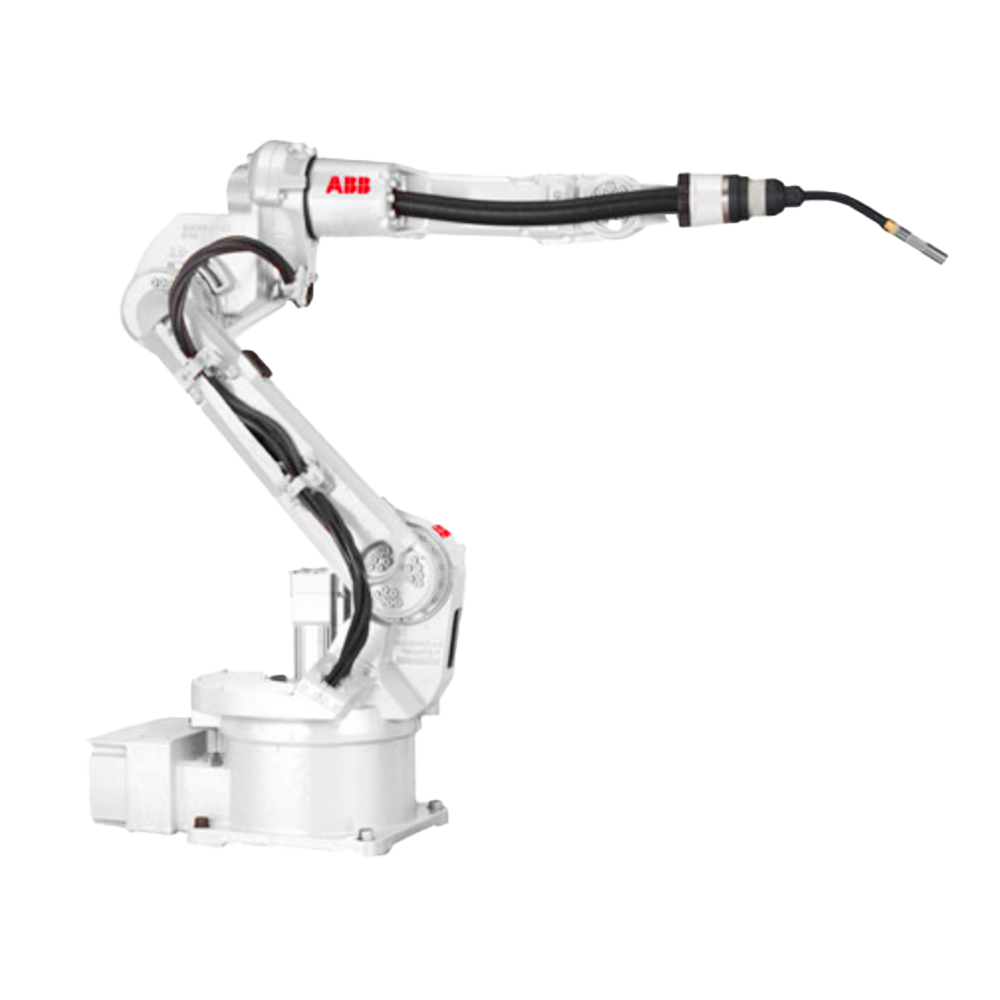
感知系统:感知系统由内部传感器和外部传感器组成,其是获取机器人内部和外部环境信息,并把这些信息反馈给控制系统。内部状态传感器用来检测机器人本身状态(如手臂间的角度)的传感器,多为检测位置和角度的传感器。具体有:位置传感器、角度传感器等。外部状态传感器用来检测机器人所处环境(如检测物体,距离物体的距离)及状况(如检测抓取的物体是否滑落)的传感器。具体有距离传感器、视觉传感器、力觉传感器等。外部传感器一方面使机器人更准确地获取周围环境情况,另一方面也能起到误差矫正的作用。

Perception system: The perception system consists of internal sensors and external sensors, which obtain information about the robot's internal and external environment, and feedback this information to the control system. Internal state sensors are sensors used to detect the status of the robot itself (such as the angle between arms), mostly for detecting position and angle. Specifically, there are position sensors, angle sensors, etc. External state sensors are sensors used to detect the environment in which the robot is located (such as detecting objects, distance from objects) and the condition (such as detecting whether the grasped object has slipped). Specifically, there are distance sensors, visual sensors, force sensors, etc. External sensors not only enable robots to obtain more accurate information about the surrounding environment, but also play a role in error correction.
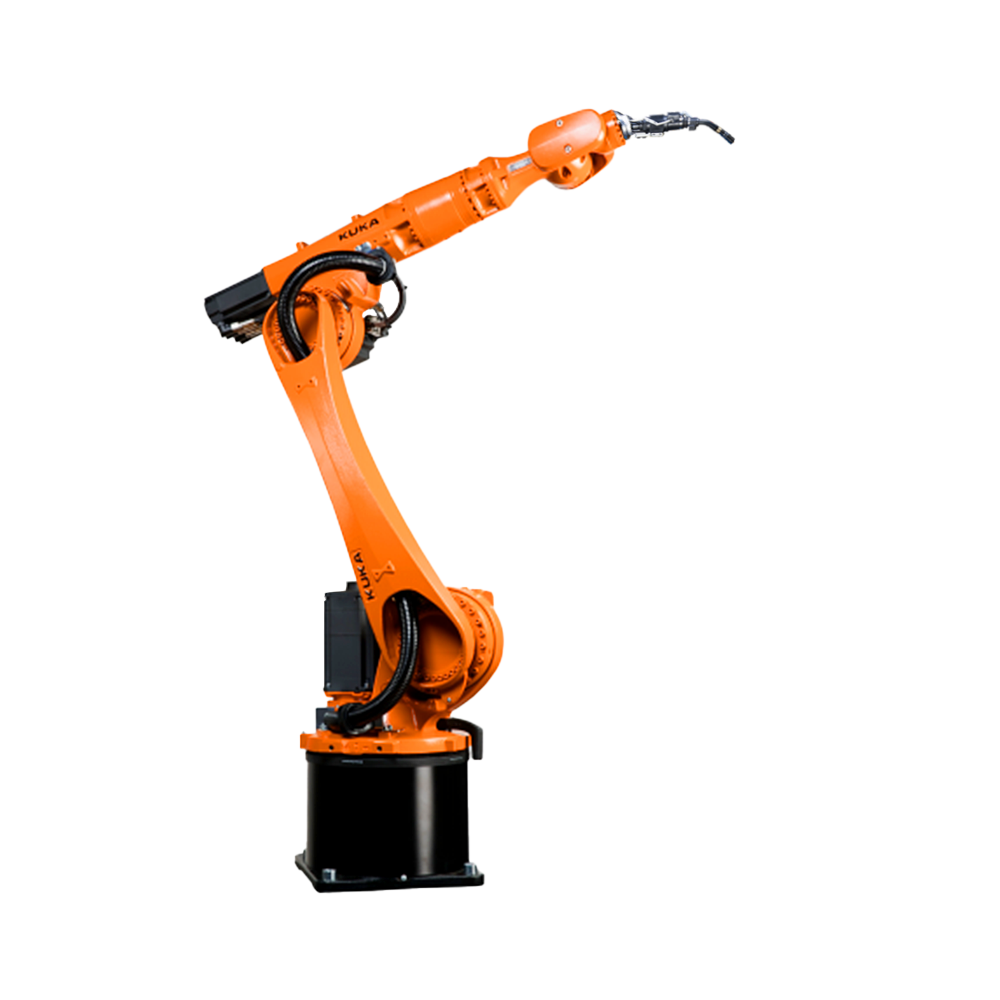
机器人一环境交互系统:作用:机器人一环境交互系统是实现工业机器人与外部环境中的设备相互联系和协调的系统。工业机器人与外部设备集成为一个功能单元,如加工制造单元、焊接单元、装配单元等。也可以是多台机器人、多台机床或设备、多个零件存储装置等集成为一个去执行复杂任务的功能单元。
Robot environment interaction system: Function: The robot environment interaction system is a system that enables the interconnection and coordination between industrial robots and equipment in the external environment. Industrial robots are integrated with external devices into a functional unit, such as processing and manufacturing units, welding units, assembly units, etc. It can also be a functional unit that integrates multiple robots, machine tools or equipment, and multiple parts storage devices to perform complex tasks.
人机交互系统:是使操作人员参与机器人控制,并与机器人进行联系的装置。归纳起来分为两大类:指令给定装置和信息显示装置。控制系统的任务是根据机器人的作业指令从传感器获取反馈信号,控制机器人的执行机构,使其完成规定的运动和功能。
Human computer interaction system: It is a device that allows operators to participate in robot control and communicate with the robot. It can be classified into two categories: instruction giving devices and information display devices. The task of the control system is to obtain feedback signals from sensors based on the robot's operation instructions, control the robot's execution mechanism, and enable it to complete the specified movements and functions.
本文由焊接机器人友情奉献.更多有关的知识请点击:真诚的态度.为您提供为的服务.更多有关的知识我们将会陆续向大家奉献.敬请期待.
This article is dedicated by welding robots. For more related knowledge, please click: Sincere attitude. We will provide you with comprehensive service. We will gradually contribute more relevant knowledge to everyone. Stay tuned
 微信二维码
微信二维码  抖音二维码
抖音二维码
咨询热线:0531-82766496
15553199811(微信同号)
山东省济南市历城区工业北路5777号中电建能源谷4-B-4
截屏,微信识别二维码